LMEC-7 폴의 진자
LMEC-7폴의 진자
실험
1. 자유 진동 - 밸런스 휠의 진폭 θ와 자유 진동 주기 T 사이의 대응성 측정
2. 감쇠계수 β의 결정.
3. 강제진동의 진폭-주파수 특성 및 위상-주파수 특성 곡선의 결정.
4. 다양한 감쇠가 강제 진동에 미치는 영향 연구 및 공진 현상 관찰.
5. 스트로보스코픽 방법을 사용하여 위상 차이와 같은 움직이는 물체의 특정 양을 결정하는 방법을 배웁니다.
주요 사양
| 봄의 고집스러움 요소 K | 자유 진동 기간의 변화 2% 미만 |
| 시간 측정 | 정확도 0.001초, 사이클 측정 오차 0.2% |
| 기계 진자 | 인덱싱 슬롯, 인덱싱 2°, 반경 100mm |
| 진폭 측정 | 오차 ±1° |
| 광전 센서 A | 이중 광전 신호 검출 |
| 광전 센서 B | 단일 광전 신호 감지 |
| 모터 속도(강제 주파수) 범위 | 30~45rpm 및 연속 조정 가능 |
| 모터 속도 불안정 | 0.05% 미만으로 안정적인 테스트 사이클을 보장합니다. |
| 시스템 댐핑 | 진폭 감쇠당 2° 미만 |
세부
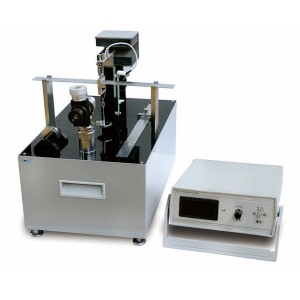
시스템 구성 요소: Pohl 공명 실험 장치, Pohl 공명 실험 컨트롤러, 별도 플래시 어셈블리, 광전 센서 2개(A형 및 B형 각 1개)
폴 공명 실험 장치.
1. 스프링 고집계수 K : 자유진동주기의 변화가 2% 이내.
2. 시간 측정(10주기): 정확도 0.001초, 주기 측정 오차 0.2%.
3. 전자기 감쇠가 없는 경우 시스템 감쇠: 진폭 감쇠당 2° 미만.
4. 기계식 진자: 인덱싱 슬롯, 인덱싱 2°, 반경 100mm.
5. 진폭 측정: 오차 ±1°; 진폭 측정 방법: 광전 검출.
6. 광전 센서 A: 이중 광전 신호 감지, 광전 센서 B: 단일 광전 신호 감지.
7. 모터 속도(강제 주파수) 범위: 30~45rpm이며 연속 조정 가능.
8. 모터 속도 불안정성: 0.05% 미만으로 안정적인 테스트 사이클을 보장합니다.
9. 위상차 측정.
위상차 측정에는 스트로보스코픽 방식과 계측학적 방식이 있으며, 두 방식 간 편차는 3° 미만입니다.
도량형적 방법의 측정 범위는 50°에서 160° 사이입니다.
스트로보스코프 측정 범위는 0°~180°이며, 반복 측정 편차는 <2°입니다.
10. 플래시: 저전압 구동, 실험 장치와 분리된 플래시, 2ms 연속 플래시 시간, 눈길을 끄는 빨간색 색상.
11. 소음이 적고, 집단 실험 중 방해나 불편함이 없습니다.
폴 공명 실험 컨트롤러.
1. 특수 실험 컨트롤러를 사용하여 데이터를 수집하고 표시합니다. 대형 도트 매트릭스 LCD 디스플레이를 사용하여 실험을 안내하는 메뉴, 알림 메모(전자 사용 설명서), 실험 데이터의 표시 및 확인을 담당합니다.
2. 스트로브 전용 제어 인터페이스.